

激光导航叉车AGV
1、 产品介绍
激光导航叉车AGV运载能力强可以直接叉取物料托盘进行运输,转弯时自动减速且有自动识别障碍物并及时停止等功能,行走安全可靠;用于生产线上的原材料配送及半成品、成品的运输和工厂仓库码垛等,工业生产中能代替人做某些单调、频繁、劳动强度大且重复长时间作业或是危险、恶劣环境下的作业。
SLAM激光技术,无需场景改造,自动生成精确环境地图,实现路径规划、调度,具有通用接口,可快速搭载各种应用功能附件,实时反馈机器人工作状态,具备自检及故障检测功能。
(1)主要用途:从成品下线到多层仓库,激光导引叉车式AGV可实现带托盘物料的落地或堆高摆放,最常见于烟草、金融、电力、机车等仓储库房。
(2)主要特点:①利用激光扫描定位技术实现导引,不需地面施工,路线柔性化规划。②停位精度高达±15mm,运行速度最高45米/分。③强大的AGV管理系统,可管理多台AGV同时运行,包括路径规划、任务调度、实时监控、在线充电、故障诊断等功能,并可与WMS、ERP、MES等系统接口对接,完成信息化管理。
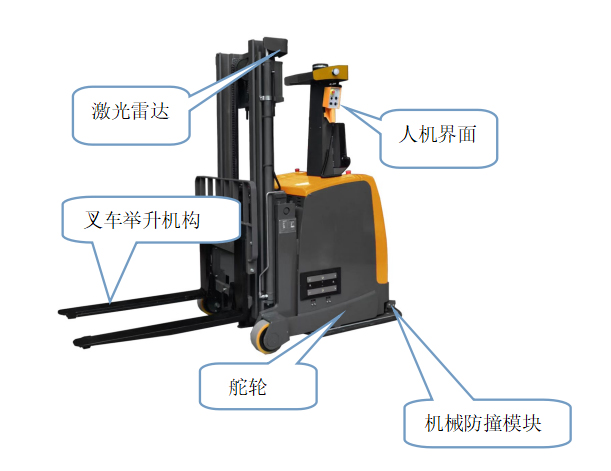
2、产品原理:激光导航叉车AGV主要组成模块
①叉车AGV车体
②驱动模块:舵轮驱动器组
②导航模块:激光雷达、控制器模块
③安全模块:障碍物传感器、机械防撞模组、急停开关
④操作面板:人机界面、电源开关、启动/停止、复位按钮、急停按钮、电量指示、音乐喇叭、三色警示灯等
⑤动力模块:蓄电池组
⑥控制系统:瑞鹏核心控制主板模块
⑦其它定制模块

3、技术参数
|
序号 |
项目 |
基本参数 |
|
1 |
AGV型号 |
RP-LF-H2155DQ-BC1 |
|
2 |
外形尺寸 |
2098×1060×2155 mm (L x W x H) |
|
4 |
运载方式 |
叉车型 |
|
5 |
引导方式 |
激光导航+二微码 |
|
6 |
驱动方式 |
舵轮 |
|
7 |
最小转弯半径 |
≥1000mm |
|
8 |
行驶速度 |
0-45m/min |
|
9 |
行走功能 |
前进、后退、减速、转弯,可自动叉取卡板货物,自动装卸货物 |
|
10 |
控制方式 |
微电脑控制 |
|
11 |
定位方式 |
电子地图定位 |
|
12 |
通讯方式 |
WiFi |
|
13 |
停止精度 |
±5mm~±15mm |
|
14 |
最大运载质量 |
≤1500kg(其他需求可定制) |
|
15 |
供电方式 |
DC48V |
|
16 |
电池容量 |
200AH充电蓄电池(其他容量需求可定制) |
|
17 |
续航时间 |
≤8h,充电次数大于1000次 |
|
18 |
充电方式 |
离线充电(自动充电可选配) |
|
19 |
人机界面 |
PC软件界面 |
|
20 |
安全防护 |
激光测距+障碍物传感器+急停开关 |
|
21 |
电量显示 |
电压显示 |
|
22 |
使用环境 |
室内、室外防雨场地,温度范围:0-50°,湿度:60%至85%,爬坡能力:低于2° |
|
23 |
AGV使用寿命 |
≤8年(一年之内保修) |
4、SLAM激光导航AGV优势
Ø 无需改变环境:采用激光雷达扫描场地地图,无需铺设磁条、激光板等定位措施;
Ø 实时精确定位:通过惯性器件、激光雷达等多种数据源进行融合定位;
Ø 智能路径规划:在地图范围内设置目标坐标后,能够自主规划最优路径;
Ø 智能实时避障:依据实际需求,可以设置为避障模式绕开障碍物,也可在障碍物出现后停车等待。

激光雷达:轻松扫描地图;便捷改变行驶路径

5、安全性
(1)AGV的前进端安装有避障传感器与辅助避障传感器,扫描系统可以检知运行范围0~3m内(扇形范围)的障碍物,在0~3米内无盲区;
(2)机械防碰撞传感器:弹性板和传感器构成的防碰撞系统,可以检测来自前进方向的 轻微机械碰撞并紧急刹车,避免造成对人体和物品的碰撞损坏;正面装有光电系统,侧面扫描系统可根据现场路线布置设定使用和不使用;
(3)声光提示:当小车在正常运输过程中,小车伴随悠扬音乐,不同状态可选择不同提示音乐;当有障碍物时,发出报警声和警灯闪烁;
(4)急停装置: AGV系统在突发异常状况下,有急停装置维护自身,急停开关安装在易于操作的部位。
6、安装环境
①地面越平坦,精度越高;
②作业区域内无大面积玻璃窗、不锈钢板、金属管等;
③安装用时:只需调试使用程序, 3-5天;
④路径变更,激光叉车采集新路径信息,修改地图。